After a pause while I waited for new hardware to arrive and enough free time to play with it I returned to experimenting with my FRDM-KL25Z. After having tried both the Mbed library and Processor Expert I thought it was time to remove the training wheels and learn to use this thing properly. Both Mbed and PE have their uses, but they hide many important details about how the device functions that I need to know. After figuring out how to configure GPIO pins manually (I recommend this series of articles if you want a gentle introduction to how to use clocks and GPIO pins on the KL25Z) and writing a simple program in C++ (C is a good language, but C++ is so much easier to work with) the only thing I was missing was FreeRTOS. This will not be a complete guide to installing FreeRTOS. I will refer you to other guides that can take you through that part. These are only a few notes and suggestions that should help you avoid some of my mistakes.
As you may already know, there is no official port of FreeRTOS for the Kinetis L series of ARM Cortex M0+ MCUs. Fortunately there is an unofficial port by Erich Styger. The bad news is that the port is built around PE, and your will need to set it up together with Eclipse if you want to use FreeRTOS. The good news is that you only need to use it once and export the necessary code. Once you are done you can use whatever development tools you want.
Before you go any further you must follow Styger’s instructions for how to set up PE with Eclipse, and while it isn’t necessary you should also read his instructions for setting up and configuring FreeRTOS with PE. Play around with it. Make sure that it is working. Then read his instructions for generating static code from the FreeRTOS PE component that can be extracted and used on its own.
If you follow the instructions you will be left with a folder with all FreeRTOS code. Now comes the tricky part: using it in a project without PE. The exact details will depend on the tools and libraries you are using. In my case I wanted to create a C++ project in Eclipse using the GCC-ARM Eclipse plugin. I will go through some of the steps I had to take to get it to work and point out a few things that gave me trouble.
Once you have created a static copy of the FreeRTOS code, move it into your new project.
I put all FreeRTOS files in one folder to simplify things.
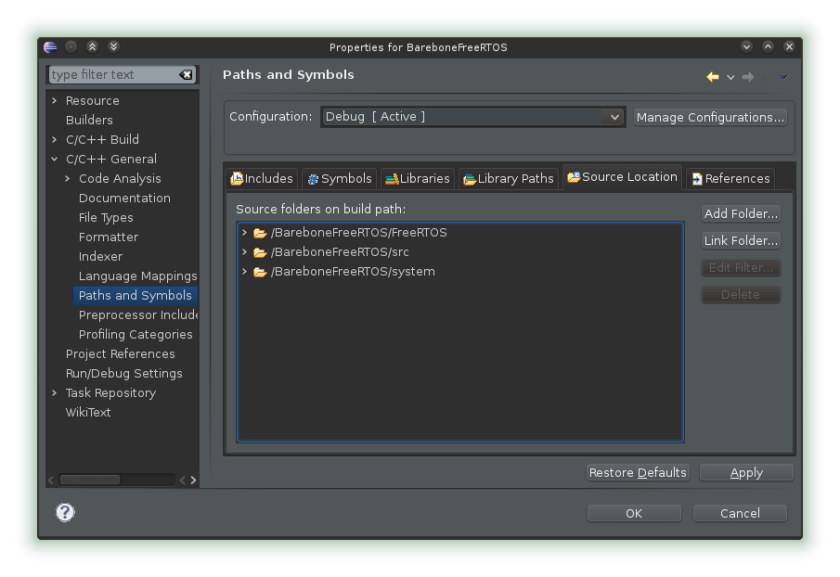
Open the project properties and make the FreeRTOS folder a source folder.
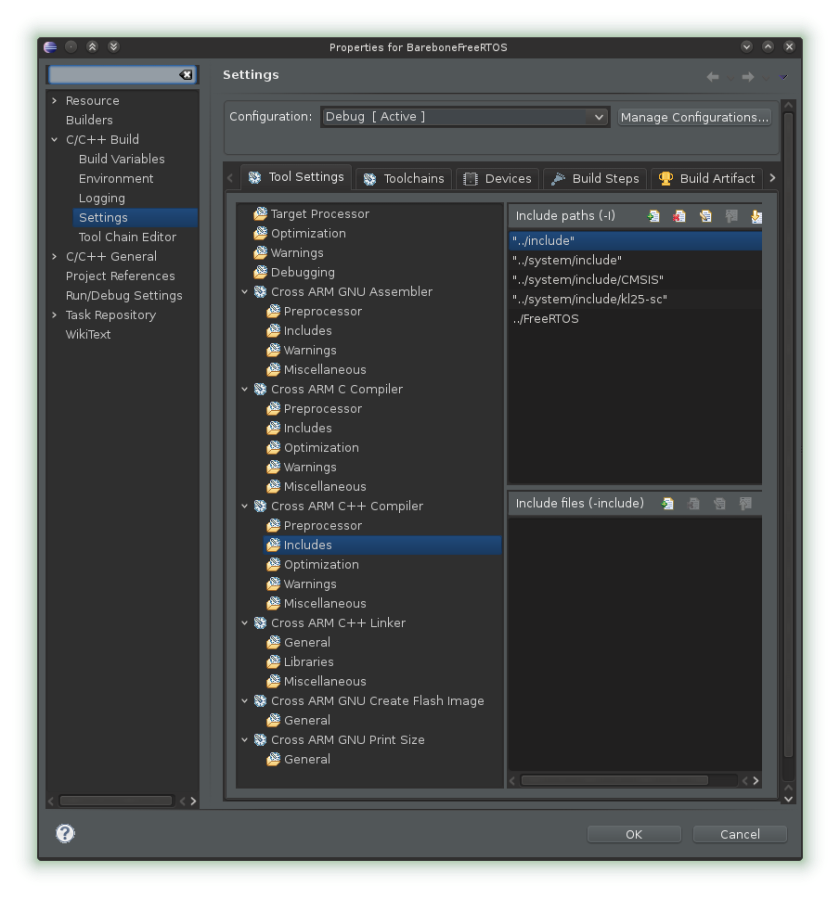
Go to the build settings and also add the folder to the include path.
This should be enough for Eclipse to find all the new files, but if you now try to compile it you will get a long list of errors. Most of these are simple things that are easily fixed.
Getting interrupts to work was the hardest part. It is quite simple once you know what the problem is, but it was not obvious. The FreeRTOS code you have is set up to use the interrupt handlers and interrupt vectors created by other PE components. Since you do not have those components you must modify some parts of the code.
First, copy the ‘Events.h’ and ‘Events.c’ files from your PE project, remove all interrupt handlers not starting with FRTOS_ (assuming there are any), and then remove the FRTOS_ part of all function names (e.g. vApplicationIdleHook instead of FRTOS_vApplicationIdleHook). Do a search through all your other FreeRTOS code and do the same there (or wait for the compiler to complain). Some function names will be incorrect. If you are using C++ also make sure that the event files are enclosed within extern blocks. They will be used both by FreeRTOS’s C code and your C++ code.
#ifdef __cplusplus
extern "C" {
#endif
...
#ifdef __cplusplus
}
#endif
Next, if you are not using the interrupt vector you got from PE and instead uses the one from the GCC-ARM plugin (‘vectors_MKL25Z.c’), then you will have to change some function names. FreeRTOS uses a couple of interrupt handlers.
- SysTick_Handler
- SVC_Handler
- PendSV_Handler
Your FreeRTOS code and ‘vectors_MKL25Z.c’ will use different names for these interrupt handlers. This must be fixed.
In ‘portmacro.h’, replace the lines 291-293
void vPortSVCHandler(void); /* SVC interrupt handler */ void vPortPendSVHandler(void); /* PendSV interrupt handler */ void vPortTickHandler(void); /* Systick interrupt handler */
with
void SVC_Handler(void); /* SVC interrupt handler */ void PendSV_Handler(void); /* PendSV interrupt handler */ void SysTick_Handler(void); /* Systick interrupt handler */
In ‘port.h’, replace line 727
void vPortTickHandler(void) {
with
void SysTick_Handler(void) {
The line 848
__attribute__ ((naked)) void vPortSVCHandler(void) {
with
__attribute__ ((naked)) void SVC_Handler(void) {
And the line 999
__attribute__ ((naked)) void vPortPendSVHandler(void) {
with
__attribute__ ((naked)) void PendSV_Handler(void) {
The rest should be easy. There will be some inclusions of header files to remove and some that must be added, and a few function and variable names will be wrong. You also have to configure FreeRTOS (unless you did so before exporting the code). This is done in the ‘FreeRTOSConfig.h file’. Refer to FreeRTOS’s documentation for more information about that part.

